
TDDE19 Advanced Project Course - AI and Machine Learning
Projects
Projects
Students will be divided into a group of around six students. Each group is assigned to a project (according to the preference and skills of each student).
At the end of the project, the students are expected to provide:
- Source code of library/program in a gitlab repository
- Documentation of how to use and install the software (API, command line...)
- A group report describing the work that has been accomplished (which algorithms are used, what kind of results were obtained...)
- An individual list of contributions to the project.
Important: the deadline for the selection of projects is Wednesday 1th of September 2021 at 12:00, you need to send me an email (cyrille.berger at liu.se) with the following information:
- Your LiU login.
- A ranked list of all projects (details on the projects below)
- If you want to work as a group of several people together, send me a single email with all your LiU logins
Natural Language to Query
Customer: Cyrille Berger
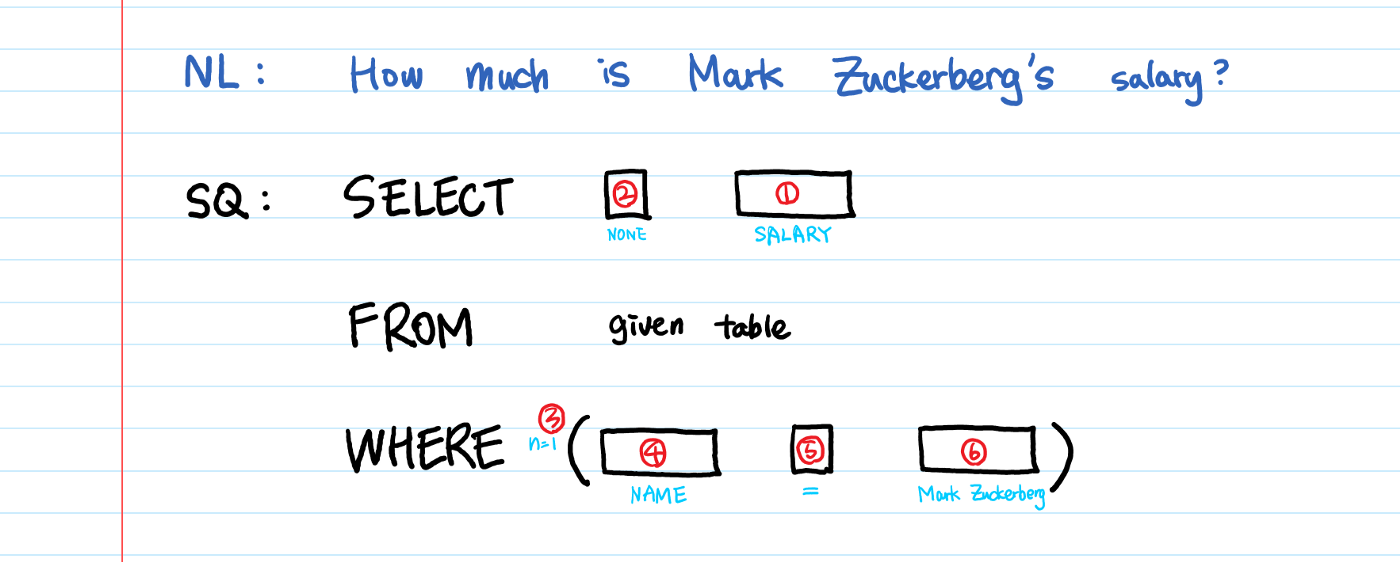
Context: the goal of this project is to transform a question in English into a query executed on a database. We are particularly interested in queries expressed in the SPARQL language for the Semantic Web. We are also interested in applying this technique to a custom query language (called scQL). We do not have a dataset for that language yet. An important question for us would be how much training data we need to use transfer learning for our custom query language.
Task suggestions:
- Study literature
- Select several algorithms, implement them and evaluate them with benchmark datasets for SQL
- Use transfert learning on those algorithms with varying size of SPARQL datasets
References:
- [Text-to-SQL] Learning to query tables with natural language
- WikiSQL
- SPBERT: A Pre-trained Model for SPARQL Query Language
Results
Path Planning for a ground vehicule in collaboration with an UAV
Customer: Cyrille Berger
Context: in this project, we consider that we have a multi-robot system with Unmanned Ground Vehicles (UGVs) and Unmanned Aerial Vehicles (UAVs). The goal of the project is for the UAVs to assist with path planning for UGVs. One approach would be for the UAVs to build a map of the environment and generate a plan. An alternative approach would be for the UAV to fly and generate the plan directly.
I would also be interested in connecting the path planning with a knowledge base. For instance, it could be useful to store the plan, and then later reuse it. Or reuse part of it.
Example of robotic system involved:


Task suggestions:
- Study literature
- Implement and evaluate some algorithms
References:
Results
Anomaly detection from video streams in reconnaissance missions
Customer: Combitech
Context: A drone is performing a task of flying over a set area during it's daily routines. Upon running the same routine the next day, the current stream is compared to the last recorded stream. The goal of this project is to compare these recordings to each other, detect changes in the new recording, and determine whether the change is significant enough to be seen as an anomaly. Anomalies will be highlighted and used for further investigation and decision making in surveillance and rescue missions.
Task suggestions:
- Study literature
- Select several algorithms, implement them and evaluate them with benchmark datasets
References:
Results (Group 1)
Results (Group 2)
Project "Autonomous housekeeping"
Customer: Trafikverket
Context: Trafikverket (The Swedish Transport Administration) has established a lab in Linköping, exploring new technology such as AI, machine learning and robotics. The proposed project can be accomplished in a lab environment, while still maintaining a clear connection to relevant areas of use in the transporation system. Trafikverket has bought a Turtlbot 4 for this project, which can be used freely by the project group within the lab premises.
In the project "Autonomous housekeeping" you will get the opportunity to realize an autonomous robot with the capability to build and maintain a useful world view of the lab premises. It includes the abilities to
The idea is that these abilities corresponds to what is necessary in order to perform inspections and discover deviations in trains, transportation infrastructure etc. A future project building on this can for example be a Spot robot which inspects the underside of a train, or a Spot/UAV which investigates/monitors a train track. It further corresponts to the ability of being able to have a good world view, and the knowledge of where different objects are placed in an environment. This can for example be used to help passangers to find anything from a trashbin to a temporary bus station.
You will get access to our lab in Tannefors, but can of course do much of the project on Campus. Trafikverket will buy any necessary equipment after discussions with LiU specialists and you students. Trafikverket will be available for supervision according to agreement.
Task suggestions:
- Study literature
- Select several algorithms, implement them and evaluate them with benchmark datasets
References:
- Turtebot4
- Robot Operating System
- Navigation while mapping (SLAM)
- SLAM using RGB-D camera
- Volumetric mapping
Results
Project "Autonomous station master"
Customer: Trafikverket
Context: Trafikverket (The Swedish Transport Administration) has established a lab in Linköping, exploring new technology such as AI, machine learning and robotics. The proposed project can be accomplished in a lab environment, while still maintaining a clear connection to relevant areas of use in the transporation system. Trafikverket has bought a Turtlbot 4 for this project, which can be used freely by the project group within the lab premises.
In the project "Autonomous station master" you will get the opportunity to realize an autonomous robot with the capability to interact with people in a pleasent and helpful way. It includes the abilities to
The idea is that these abilities corresponds to what is necessary for a robot to be able to perform its role as a station master at a railway station. The major focus of this project is on the human-robot interaction.
You will get access to our lab in Tannefors, but can of course do much of the project on Campus. Trafikverket will buy any necessary equipment after discussions with LiU specialists and you students. Trafikverket will be available for supervision according to agreement.
Task suggestions:
- Study literature
- Select several algorithms, implement them and evaluate them with benchmark datasets
References:
Results
Autonomous aircraft operating in commercial airspace with air traffic control.
Customer: SAAB Regnskogen
Context: Saabâs internal start-up for pioneering new technology and markets, The Rainforest, is interested in the emerging market of autonomous aircraft.
Autonomous aircraft would open up dramatic new possibilities when it comes to transportation of critical medical supplies, surveillance of forest fires or even for cheaper and safer air travel.
Ideally, autonomous aircraft should be able to operate side-by-side with manned aircraft in ordinary airspace travelling between regular airports. To control the safe operation of manned aircraft, air traffic control (ATC) guides aircraft from one airport to another. Autonomous aircraft should also be able to follow verbal instructions from air traffic control.
In this project you will get the opportunity to integrate motion planning with an already existing (but perhaps not good enough) NLP-model which can interpret ATC commands into abstract actions. The goal is to have a motion planning and task planning software that can autonomously fly a simulated aircraft according to ATC commands from airport to airport.

Task suggestions:
- Generate controllers (MPC) for suitable flight modes based on code skeleton and an already implemented physical model of airplane dynamics. E.g., fly straight, follow a specified trajectory, take-off, landing.
- Generate motion primitives (pieces of predetermined trajectory motions) suitable for desired motion commands, which can be tracked using generated MPC. E.g., pieces of motion useful for taxiing, take-off, flight to a new airport, circular wait motion, landing.
- Implement a lattice planner that finds motion plans by using A* over the graph spanned of motion primitives (the actions). Execute plans using MPC.
- Motion plan (and plan execution / control) according to ATC commands. E.g., âincrease altitudeâ, âclear for take-off", âadjust heading to XYZâ, ⦠(see references for specifics).
- Implement software components as ROS nodes and simulate airplane (and airport interactions) in Gazebo for a visually interesting demo.
References:
- ATC guide for pilots
- Guide to ATC communications
- Safe motion planning
- Automatic motion primitive generation
- Code generation library for solving optimal control problems (generate motion primitives and MPC controllers)
- Simulated Airport
- Additional Airport world
- Robot Operating System
Results
Page responsible: infomaster
Last updated: 2025-09-30
