
TDDE19 Advanced Project Course - AI and Machine Learning
Projects
Projects
Students will be divided into a group of around six students. Each group is assigned to a project (according to the preference and skills of each student).
At the end of the project, the students are expected to provide:
- Source code of library/program in a gitlab repository
- Documentation of how to use and install the software (API, command line...)
- A group report describing the work that has been accomplished (which algorithms are used, what kind of results were obtained...)
- An individual list of contributions to the project.
Important: the deadline for the selection of projects is Wednesday 4th of September at 12:00, you need to send me an email (cyrille.berger at liu.se) with the following information:
- Your LiU login.
- A ranked list of all projects (details on the projects below)
- If you want to work as a group of several people together, send me a single email with all your LiU logins
Semantic Mapping
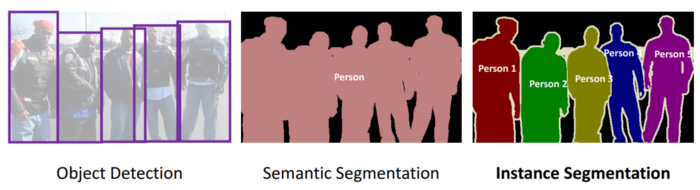
Context: one of the practical challenges in robotic is to acquire enough knowledge of the surrounding environment to take a decision. One project we are currently running in our group is to build maps where the landmarks are object detected in images using state of the art object detection. One limitation of the detection algorithms we are currently using is that they provide a bounding box of the object encompassing pixels that are part of the object and not part of the object. We want to look into semantic segmentation to have more accurate detection of the objects. Last year students worked on evaluating and implementing semantic segmentation algorithm, for this year, we would like the focus to be on instance segmentation algorithm.
Task suggestions:
- Study literature
- Select several algorithms, implement them and evaluate them with benchmark datasets
References:
- Papers With Code
- Single Stage Instance Segmentation â A Review Patrick Langechuan Liu
Results
Motion prediction
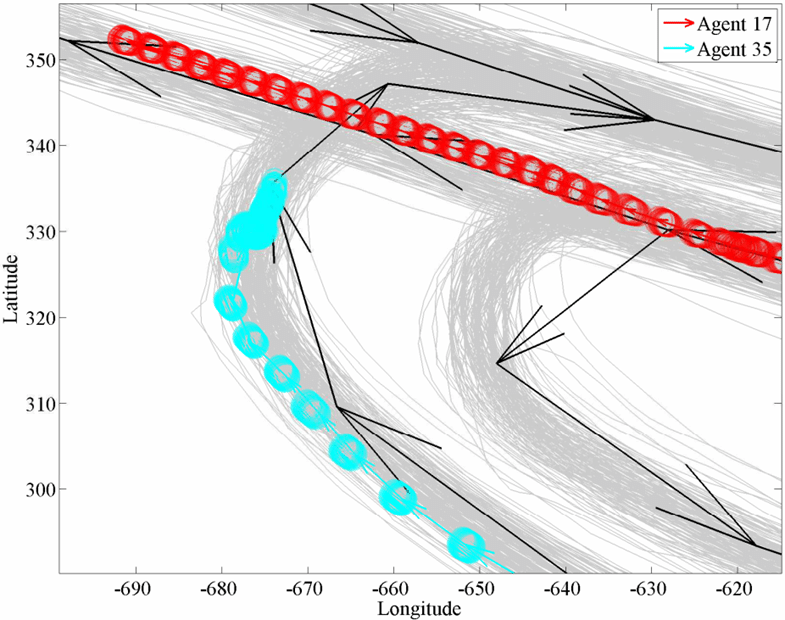
Context: in this project, the goal is given a history of positions, to predict the future position and trajectory of an object (or human).
Task suggestions:
- Study literature
- Implement and evaluate different algorithm
References:
Results
Divergent: images
Context: most social/media network work by suggesting content that is similar to what you have already watched or liked. This tends to corner the user in a bubble and limit original content the user is exposed to. It is very negative for the user creativity, the idea behind Divergent is to suggest to the user the most original content.
We assume that the user is subscribed to a set of streams of pictures, and we want to rank the pictures that come in function of their originality to the user. A possible approach is to look at how similar the new images are to the images the user has already seen.

Task suggestions:
- Study literature
- Select several algorithms, implement them and evaluate them
References:
- Papers With Code
- Image Similarity using Deep Ranking (medium) Akarsh Zingade Akarsh Zingade
- Image Similarity API
- Image similarity
Results
Divergent: text
Context: most social/media network work by suggesting content that is similar to what you have already watched or liked. This tend to corner the user in a bubble, and limit of original content the user is exposed to. This is actually very negative for the user creativity, the idead behind Divergent is to suggest to the user the most original content.
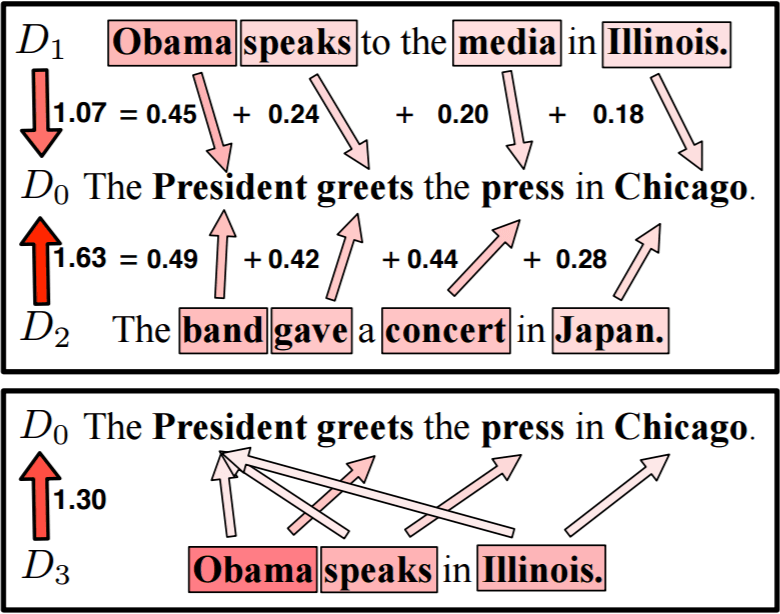
We assume that the user is subscribed to a set of stream of text (news articles...), and we want to rank the text that comes in function of their originality to the user. A possible approach is to look at how similar the new texts are to the texts the user has already read.
Task suggestions:
- Study literature
References:
- Papers With Code
- How to Rank Text Content by Semantic Similarity Rupert Thomas
- Find Text Similarities with your own Machine Learning Algorithm Günter Röhrich
- Text Similarities : Estimate the degree of similarity between two texts Adrien Sieg
- Machine Learning and AI for Plagiarism Detection
Results
Path Planning for a ground vehicule in collaboration with an UAV
Context: in this project, we consider that we have a multi-robot system with Unmanned Ground Vehicles (UGVs) and Unmanned Aerial Vehicles (UAVs). The goal of the project is for the UAVs to assist with path planning for UGVs. One approach would be for the UAVs to build a map of the environment and generate a plan. An alternative approach would be for the UAV to fly and generate the plan directly.
I would also be interested in connecting the path planning with a knowledge base. For instance, it could be useful to store the plan, and then later reuse it. Or reuse part of it.
Example of robotic system involved:


Task suggestions:
- Study literature
- Implement and evaluate some algorithms
References:
Active learning
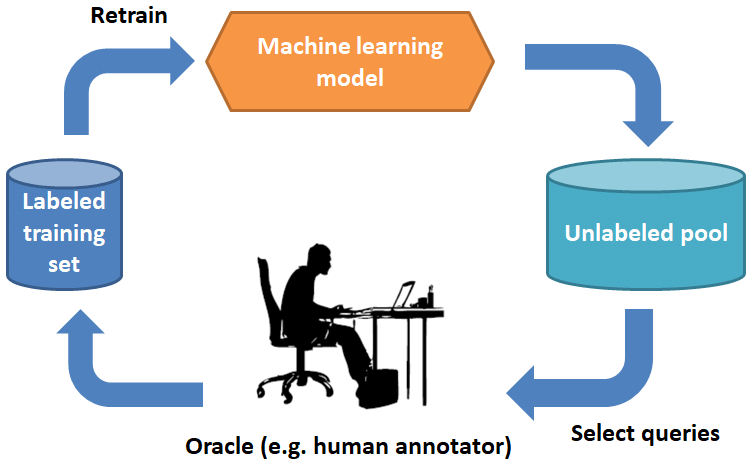
Context: until we can teach algorithms like we teach humans, a significant issue in Machine Learning application is the creation of a good training set. It is time-consuming to create valid data, and it is also challenging to create a high-quality data set. In this project, we want to investigate algorithms that can tell us the quality of the training data and tell us which data would be more interesting to label.
Task suggestions:
- Study literature
- Implement and evaluate some algorithms
References:
- Papers With Code
- Active Learning Tutorial Stefan Hosein
- Active Learning
Minecraft bot
Results
Page responsible: infomaster
Last updated: 2025-09-30
