
CUAS Topic 3: Distributed Automated Planning
Complex multi-agent missions often require automated planners to determine how available actions can be composed in order to achieve mission goals.
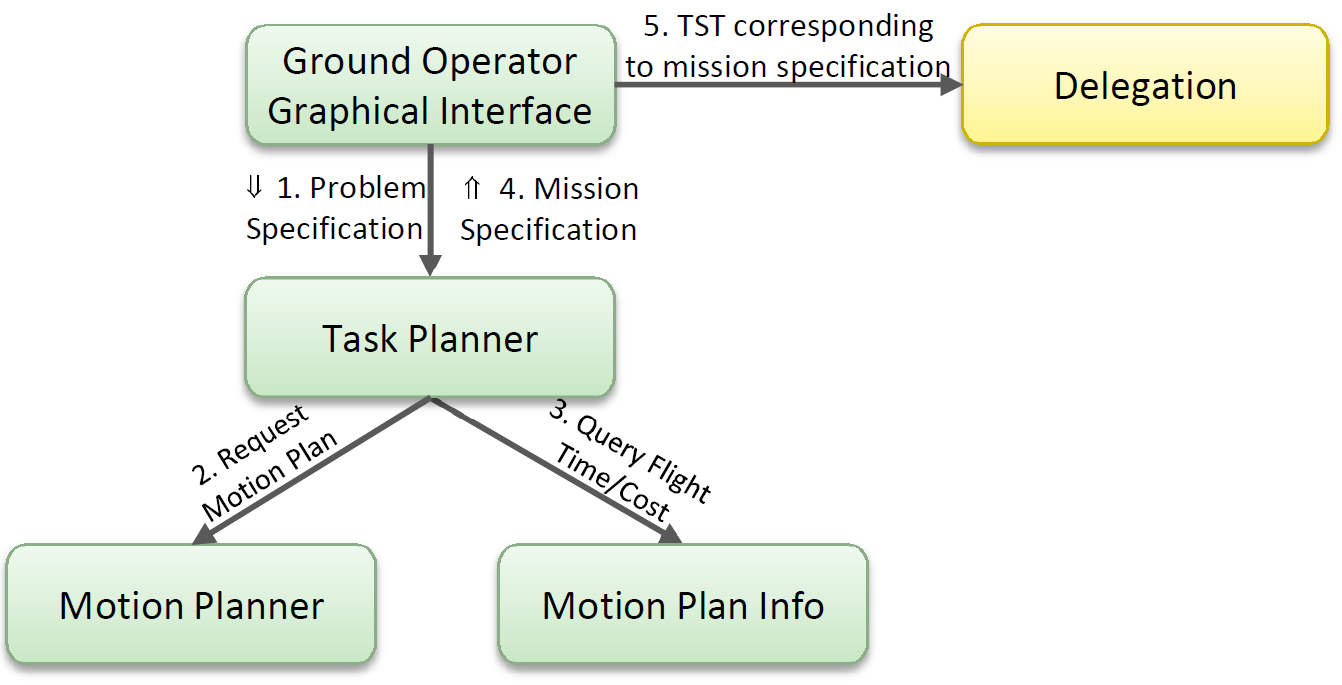
For example, as shown in the figure below, the goals of a mission could be specified by a ground operator using a graphical user interface adapted to a particular mission. A problem specification could be generated and sent to a task planner (1). This also makes use of motion planners and related functionalities to generate and query geometric trajectories that a UAV can follow (2,3). Once a solution plan is found, it is returned (4) and can be delegated to a set of suitable agents using the delegation and cooperation functionalities from topic 2 (5).
For our purposes, an automated planner must satisfy many distinct requirements, including the following:
-
As indicated above, it must be closely integrated with delegation and cooperation functionalities from topic 2. Planners must be able to use delegation to enlist the assistance of other agents in achieving mission goals and to dynamically request assistance or approval from human operators. This will result in a distributed mixed-initiative planning process with clearly defined authority and responsibilities.
-
Integration also requires a unifying sharable task structure that agents can dynamically elaborate, yet is concise, formal, and amenable to analysis in terms of safety properties.
-
Plans must be flexible yet must be rapidly generated, while a ground operator is waiting a reply. We therefore propose a novel hybrid sequential / partially ordered plan structure that will enable the creation of very rich state information, improving planning performance significantly.
-
Resources such as time, space and fuel must be taken into account. This leads to a distributed constraint problem that will be tackled both formally and pragmatically.
Page responsible: Patrick Doherty
Last updated: 2015-01-22
