
CUAS Topic 2: Delegation and Cooperation
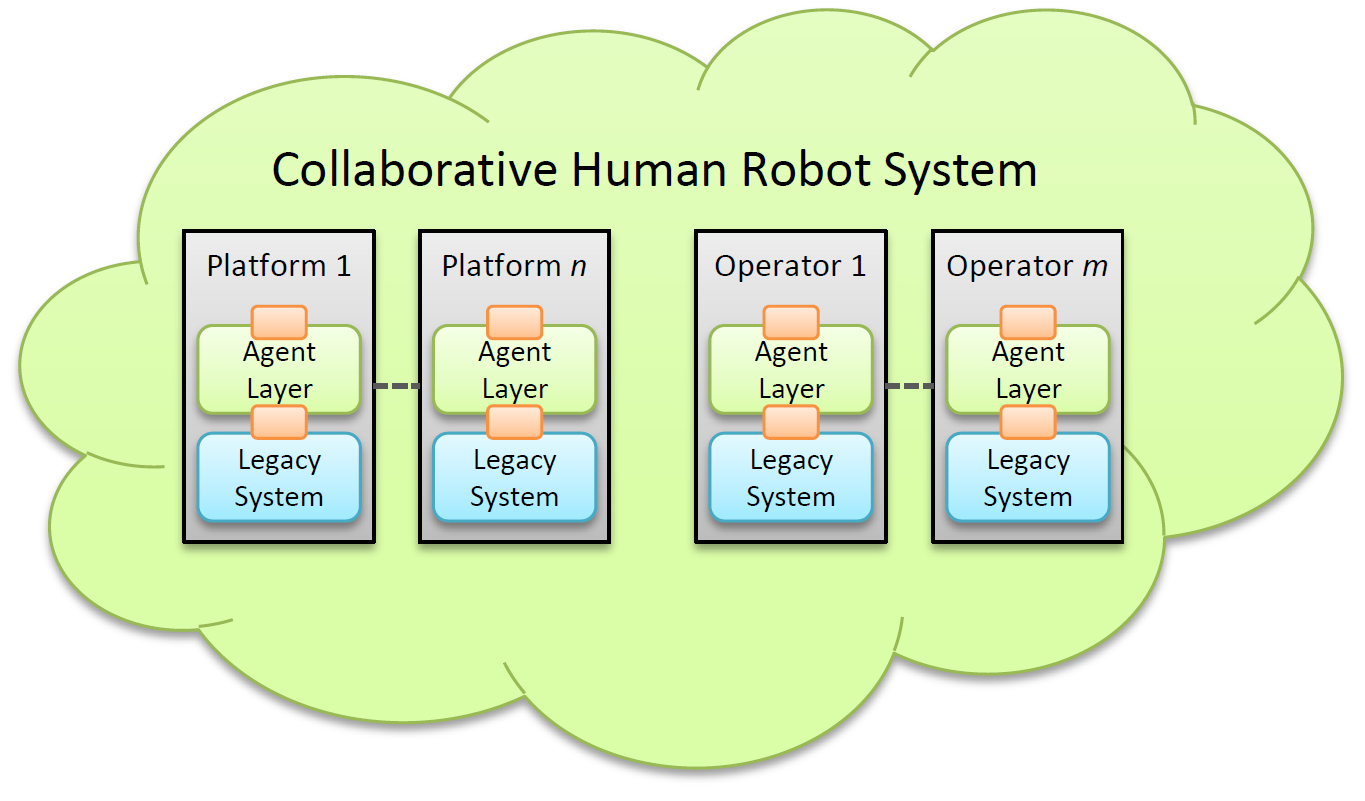
Topic 2 focuses on formal and practical uses of the concept of delegation which offers a very powerful and concise abstraction for modeling collaboration among multiple robotic systems and human resources.
The theory which can be built up around delegation also permits a unified characterization of the essential concepts of mixed-initiative interaction, where humans request help from robotic systems and vice versa, and adjustable autonomy.
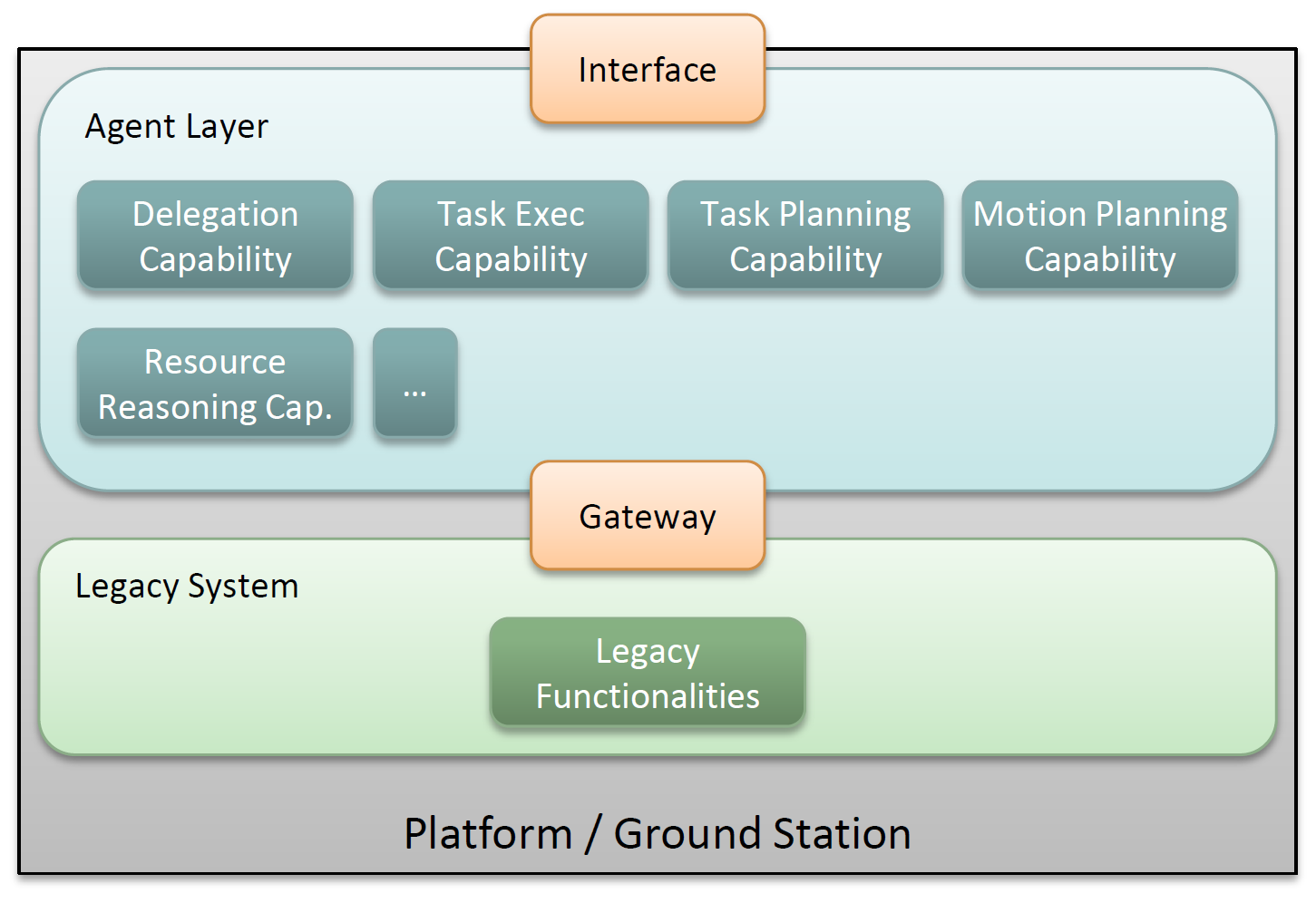
These concepts will be integrated in a high-level collaboration infrastructure based on standardized agent middleware technologies together with an agent-based layer specifically developed to interface to legacy systems through a gateway functionality.
Auction theory will be used for determining optimal participants, while constraint solving and constraint optimization techniques will support explicit temporal and spatial constraints associated with the generation of distributed temporal plans.
Page responsible: Patrick Doherty
Last updated: 2015-01-22
