
CUAS Demonstrator
Progress will be incrementally evaluated through the use of evolutionary prototyping of a software intensive system demonstrator consisting of a collection of collaborating heterogeneous unmanned aircraft systems and ground operator stations targeted to support both emergency services and security applications. The physical infrastructure for the demonstrator will consist of 3–6 micro aerial vehicle systems including PingWing fixed-wing platforms and LinkQuad quadrotor platforms in addition to two Yamaha RMAX mid-size helicopter systems, all with sophisticated sensor suites. Additionally, one static ground station and several mobile in-the-field ground stations will provide static and dynamic interfacing capabilities for human operators.
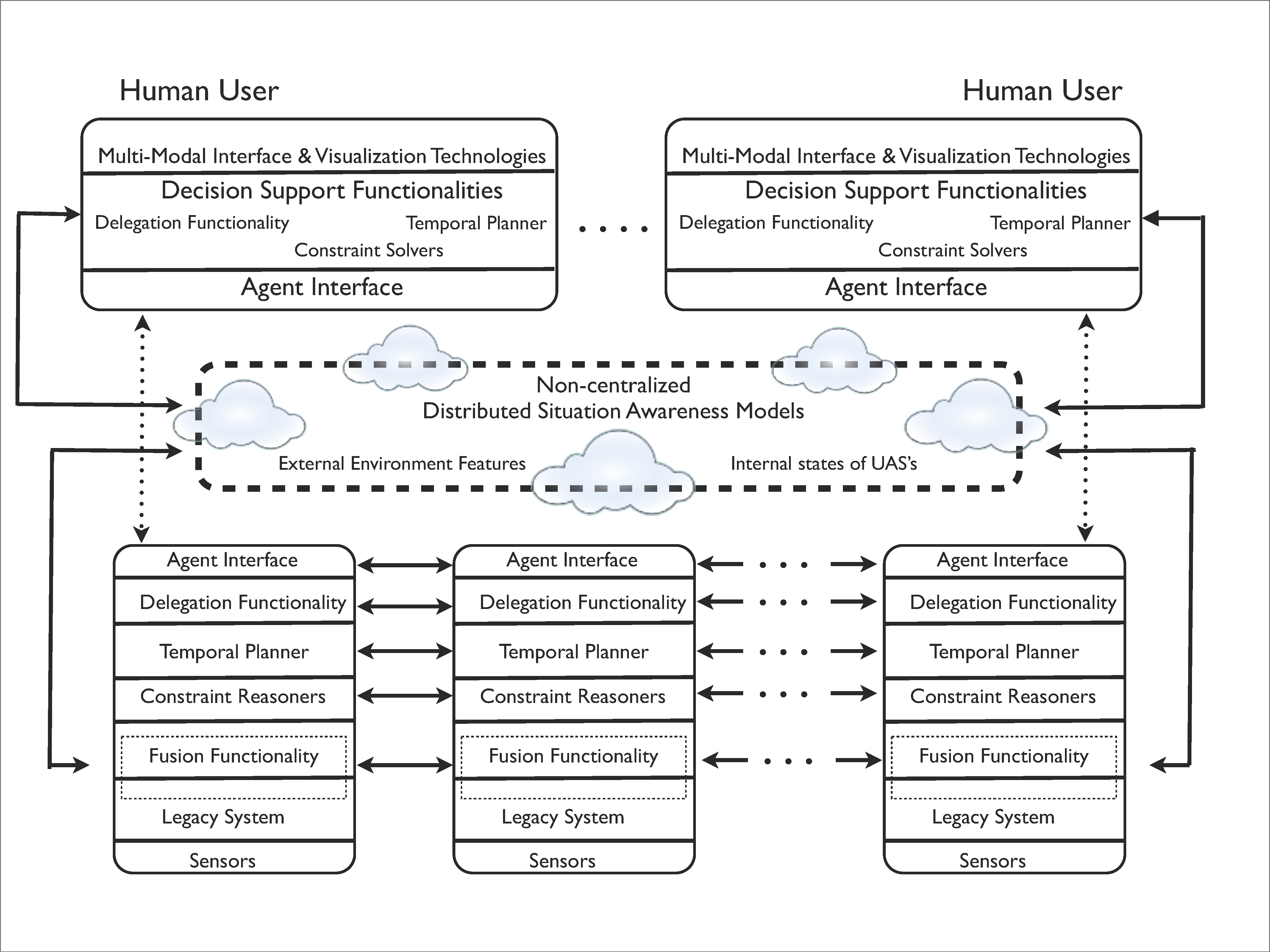
The diagram below provides a very clear depiction of the integrated system we are developing. The specification, design, implementation and deployment of this software intensive system is a major objective in the project.
Demonstrations will be based on four cutting-edge scenarios, intended to put all functionalities, algorithms, software systems and their integration to the test.
- S1: Search, Find and Assist
-
This scenario will demonstrate a collaborative mission where the goal is to provide emergency services with a real-time assessment of a disaster area in which there has been a chemical leak caused by a train wreck. This is a collaborative mission where Yamaha RMAX's, LinkQuad and PingWing micro-aerial vehicles will be used to construct and continually modify this assessment in real-time. The area will be searched for injured and geo-located. Medical and food supplies will be delivered to the injured using the RMAX systems.
- S2: Personalized MAV Assistant
-
This scenario will demonstrate the ease with which an emergency services rescue team could use PMAVs in the field with portable interfacing devices in a robust, user-friendly manner. In this demonstration, the PMAV will follow an emergency services assistant. When it is needed for different tasks, the assistant will be able to direct it through the use of the portable interface device. For example, upon finding an injured person, it could leave the PMAV to monitor this person while the assistant goes to fetch additional supplies.
- S3: Monitoring and Surveillance
-
This scenario will use a number of different aerial vehicle types to monitor and gather information about one or more building structures in an urban area. In this scenario, a smaller fixed wing platform will provide a first view of an area. Saliency points will be identified from which an RMAX platform can get to these points and take a closer look. A LinkQuad will then be physically deployed from an RMAX or from the ground and get in even closer to the structures.
- S4: Continuous Perimeter Surveillance and Multi-Target Tracking
-
In this scenario we assume a well-defined perimeter around an urban area. The collaborative task is to continually monitor the perimeter with multiple LinkQuad micro-aerial and other aerial vehicles. If persons or vehicles are identified entering, one or more LinkQuads should try and track the objects providing situation awareness to the mission initiators, while the remaining vehicles adapt to still cover the perimeter. Aerial vehicles would also have to enter and leave the collaboration to acquire new battery power.
Page responsible: Patrick Doherty
Last updated: 2015-01-22
