
Current Project Areas in AIICS
Research in the AIICS Division takes place in a number of formally funded projects and excellence centers, in addition to internally defined division projects. These internally defined projects are funded jointly through funded projects, excellence centers and university resources.
The following projects are of current interest to AIICS. Some of these projects are specific to AIICS, while others involve our active participation. The red thread relating all these project areas and activities is that they involve scientific disciplines and sub-discliplines in the broader research area of Artificial Intelligence.
Collaborative Robotic Systems
[Knowledge Processing Lab, UASTechnologies Lab]
As robotic systems begin to enter society and take on tasks that involve cooperation and collaboration with humans, there are a great many research challenges that need to be tackled before robots and humans can operate together in a robust, reliable, resilient and safe manner. The focus of the following project area in AIICS covers a broader set of topics essential to the realization of this goal. The primary flavor of this area of research combines artificial intelligence techniques with traditional robotics technologies. This is a research trend that is becoming increasingly important and will only increase in importance in the coming decades. Consequently, topics associated with collaborative robotics are well-placed to have great impact in contributing to viable solutions for many of the scientific and technical challenges that lie ahead of us. Some of the specific topics of interest are: mixed-initiative interaction, human-aware robotics, task delegation frameworks, distributed planning, distributed information structures, cloud robotics and human-robot interaction.
» Read more about this project area and our activities!
Knowledge Representation and Decision Support
[Knowledge Processing Lab, UASTechnologies Lab]
The area of Knowledge Representation and Reasoning is one of the primary and fundamental research topics in Artificial Intelligence. Why is this? Humans know and believe things. What they know and believe determines in part how they act in the world. Through sensing and reasoning, humans create and incrementally adapt internal representations or models of aspects of the world around them. These models can be used for predicting the future, analyzing the past, diagnosing when things go wrong, making decisions, and planning, among other activities. Artificial Intelligence is about the scientific understanding of the mechanisms underlying though and intelligent behavior and their embodiment in machines. Consequently, Knowledge Representation and Reasoning is an essential part of this endeavor. Whether one's interest lies in robotics, agent-based systems, decision support systems, or smart software, Knowledge Representation and Reasoning will be an essential component in making such systems intelligent. Research in AIICs includes many projects in this broad and important area of Artificial Intelligence.
» Read more about this project area and our activities!
Intelligent Unmanned Aircraft Systems
[UASTechnologies Lab]
After several decades of research development, we are now experiencing widespread use of unmanned aircraft in both the civil and commercial sectors. Much of the focus of previous research has been on conventional autonomy which targets autonomous flight, navigation and sensor capabilities. New application areas, such as package delivery, border monitoring and emergency rescue response are making it increasingly clear that additional levels of autonomous capability and intelligent decision support will be required. Issues surrounding Mission Autonomy become paramount and its interaction with traditional control autonomy introduces new ways to think about architectures, functionalities and interaction with human users. The concepts of sliding or adjustable autonomy become central research issues as do the dynamic transfer of cognitional capabilities between humans and robotic systems. In this sense, autonomy is characterized as a bounded, contextual, dynamically controllable capability shared and constrained through interaction with human users. This research area includes not only conventional approaches to autonomous behavior in unmanned aircraft systems, but this new view. Additionally, focus is placed on high autonomy or cognitive capability for such systems. The current application focus is in the area of emergency response.
» Read more about this project area and our activities!
Machine Learning and Decision Support
[UASTechnologies Lab]
Fill in!
» Read more about this project area and our activities!
Reasoning and Learning
[ReaL Group]
Fill in!
» Read more about this project area and our activities!
Selected Previous projects
CUAS
 |
The Yamaha RMAX was one of the main platforms used in the CUAS project. |
[KPLAB, UAS Technologies Lab]
The CUAS: Collaborative Unmanned Aircraft Systems project (2011- 2016) had the goal of designing and deploying a robotic collaborative systems framework based on the concept of automated delegation. Additionally, the project included research with tracking humans using UAVs in addition to developing multi-model user interfaces for rescue operators in emergency rescue scenarios. Another topic included the development of micro-uav platforms and lightweight flight boards for susch systems. The latter research resulted in the LinkQuad micro-UAV platform that led to the devlopment of a startup company: Unmanned Aircraft Systems Sweden AB.
This project was funded by the Swedish Foundation for Strategic Research (SSF) during the period (2011 - 2016)
» Read more about the SSF Cuas project!
Reconfigurable Diagnosis Systems: FlexDx
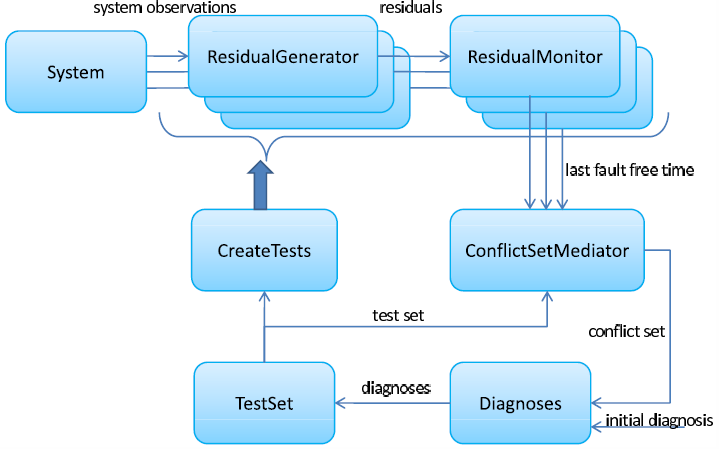 |
An overview of the components of the FlexDx implementation. |
[Knowledge Processing Lab]
Detecting and isolating multiple faults is a computationally intense task which typically consists of computing a set of tests, and then computing the diagnoses based on the test results. FlexDx is a reconfigurable diagnosis framework that reduces the computational burden by only running the tests that are currently needed. The method selects tests such that the isolation performance of the diagnostic system is maintained. The DyKnow knowledge processing middleware framework plays an important role by handling issues related to the dynamic addition and removal of tests, the ability to perform tests on historic data, and the combination of synchronous and asynchronous processing.
Troubleshooting of Automotive Systems
 |
Heavy trucks – an application domain for troubleshooting. |
[Knowledge Processing Lab, Scania AB]
In the Troubleshooting of Automotive Systems project, we develop methods for efficient automatic troubleshooting of complex systems such as heavy trucks. Troubleshooting software should guide mechanics in a workshop in the process of finding and repairing vehicle faults, with the aim being to minimize the expected cost in terms of time and money. This problem can be modeled as a probabilistic planning problem where the vehicle to be repaired is a partially observable system. This project is run in close collaboration with the truck manufacturer Scania CV AB.
» Read more about Troubleshooting of Automotive Systems!
WITAS
| |
The Yamaha RMAX was the main platform for the WITAS project. |
The WITAS Unmanned Aerial Vehicle project (1997-2005) had the long term goal of designing and deploying intelligent autonomous aircraft. Though the WITAS project itself has finished, many of the research topics are still actively being pursued withing other projects. (Groups: KPLAB, CASL, SCML)
» Read more about the WITAS project!
Page responsible: Patrick Doherty
Last updated: 2020-06-13
