

The RMAX Platform


One of the UAV platforms used in this project is a slightly modified Yamaha RMAX helicopter. The Yamaha RMAX helicopter is a radio-operated commercial system marketed in Japan by Yamaha Motor Co. Ltd. Two of these have been acquired and used as a basis for developing fully autonomous systems.
Physical Characteristics
The Yamaha RMAX has a total length of 3.6 m (including the main rotor) and is powered by a 21 hp two-stroke engine with a maximum takeoff weight of 95 kg.
Computational Hardware
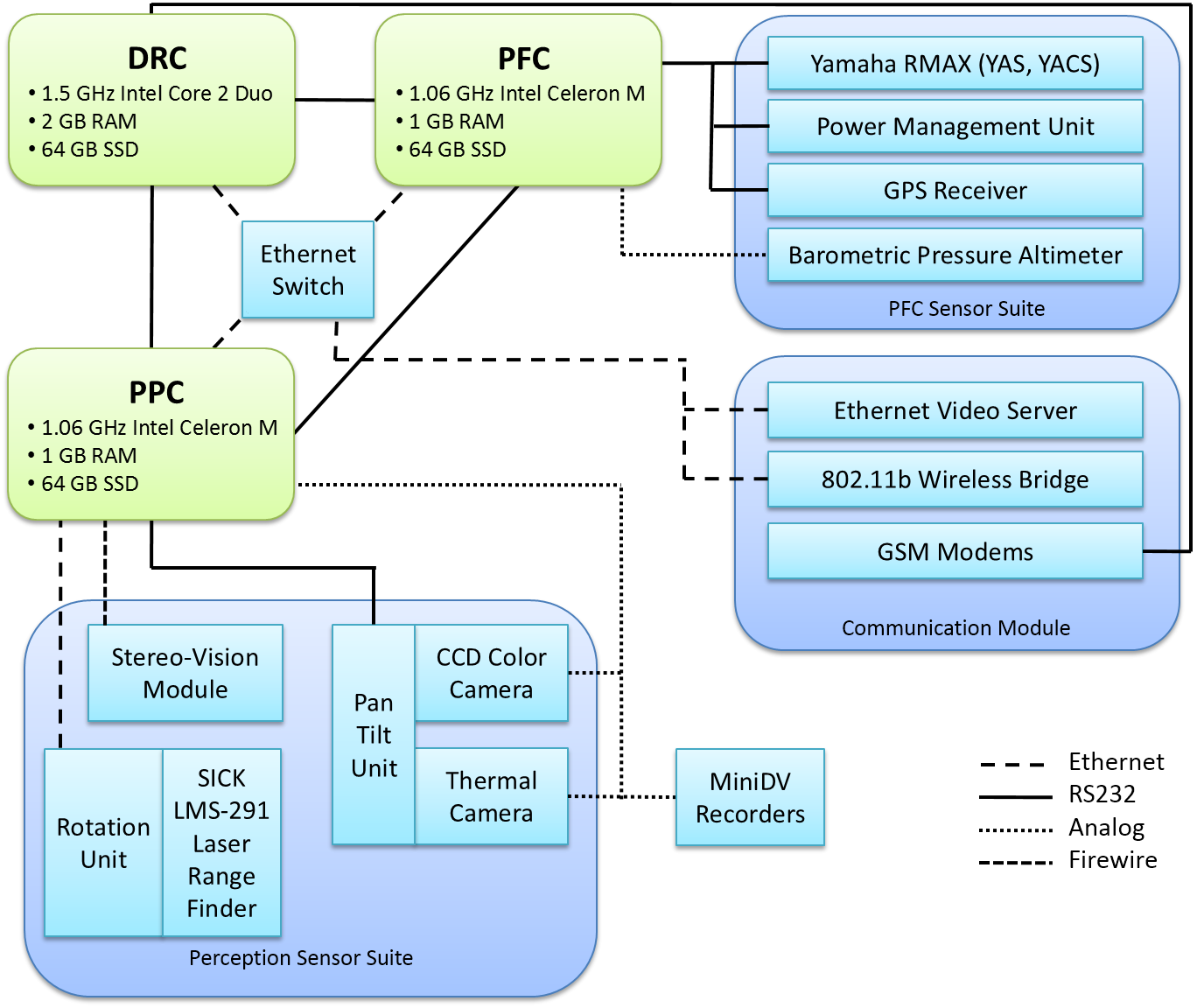
The computer systems used on-board the RMAX need to work reliably in harsh environmental conditions characterized by high vibrations, limited space and a high range of operating temperatures. The PC104 is an industrial grade embedded computer standard that is especially suited for such applications. The on-board system developed for the RMAX contains three such PC104 embedded computers. These embedded computers physically reside in a specially designed box which is integrated with the RMAX.
-
The Primary Flight Computer (PFC, 1.06 GHz Intel Celeron M) handles core flight functionalities and control modes. This computer is directly connected to a GPS receiver and several additional sensors including a barometric altitude sensor. The PFC is also connected to the RMAX helicopter through the standard Yamaha Attitude Sensor (YAS) and Yamaha Attitude Control System (YACS) interfaces.
-
The Deliberative/Reactive Computer (DRC, 1.5 GHz Intel Core 2 Duo) executes all high-level autonomous functionalities such as path planning, stream-based reasoning, and mission planning.
-
The Primary Perception Computer (PPC, 1.06 GHz Intel Celeron M) runs software related to the use of cameras, range finders and similar equipment. This includes image processing and sensor fusion.
Network communication between the on-board computers is realized with Ethernet as well as serial lines (RS232C) for robust real-time communication.
Communications, Sensors and Other Hardware
A wireless Ethernet bridge as well as a GSM modem is available for communication with ground control stations. GSM provides a mature, commercially available communication infrastructure that permits the operation of AVs at large distances, out of sight from the ground operator. It also provides a redundant alternative in the case where other communication frequencies are jammed.
A camera platform is suspended under the AV fuselage, vibration-isolated by a system of springs. The platform consists of a Sony FCB-780P CCD block camera and a ThermalEye-3600AS miniature infrared camera mounted rigidly on a Pan-Tilt Unit (PTU). The video footage from both cameras is recorded at full frame rate by two miniDV recorders to allow processing after a mission.
A modified SICK LMS-291 laser range finder has also been integrated with the RMAX using a rotation mechanism developed in-house. It is mounted on the front. This system provides the ability to generate high-accuracy 3D models of the environment in which the aircraft is operating, without the need for reflectors, markers or scene illumination.
A software-controlled power management unit provides information about voltage levels and current consumption. It also allows for remote power control where all devices can be switched on or off through software. The unit controls all three PC104 computers, all sensors, and the wireless Ethernet bridge.
Page responsible: Patrick Doherty
Last updated: 2015-01-22
