
The UAV Relay Project
|
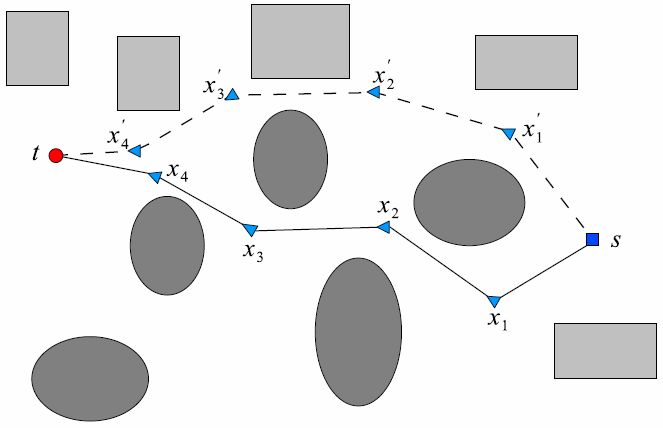
Two potential relay chains between a source s and a target t. |
A wide variety of applications for unmanned aerial vehicles (UAVs) include the need for surveillance of distant targets, including search and rescue operations, traffic surveillance and forest fire monitoring. In most cases the information gathered must be transmitted continuously from a survey UAV to a base station where the current operation is being coordinated. As this information may include urgent high volume sensor data such as live video, considerable uninterrupted communications bandwidth is often required. To minimize quality degradation, UAV applications therefore tend to require line of sight (LOS) communications, which is problematic in urban or mountainous areas. The maximum communication range also tends to be limited, especially when smaller and lower-cost UAVs are used.
Both intervening obstacles and limited range can be handled using a chain of one or more intermediate relay UAVs passing on information to the base station. This leads to the problem of planning for suitable placement of relay UAVs.
While this problem can be modeled and solved with a traditional domain-independent planner, we are also interested in developing special-purpose solvers. Such solvers may be used separately or (given suitable domain analysis) integrated as components in hybrid planners using a combination of traditional search-based planning techniques and solvers for specific subproblems.
At this point, two separate algorithms for this specific planning problem have been developed and implemented. Current and future work includes extensions to multiple targets and moving targets.
Within the scope of this project, we cooperate closely with Kaj Holmberg and Oleg Burdakov at the Division of Optimization in the Department of Mathematics.
Publications
In addition to these publications, several papers have been submitted or are in the process of being submitted.
Page responsible: Patrick Doherty
Last updated: 2014-04-30
