
Current Projects
Research by members of the Automated Planning and Diagnosis group takes place in a number of projects, which are often run in close cooperation with other groups and labs in the AIICS Division. All of our current projects have resulted in implemented systems and prototypes, many of which are also in active use in the larger scope of the UASTech UAV project.
The following projects (listed in alphabetical order) are actively being pursued. See also the list of previous projects.
[an error occurred while processing this directive] [an error occurred while processing this directive] [an error occurred while processing this directive]Logical Agents
 |
A dialog-based adventure game using Logical Agents. |
[Knowledge Processing Lab]
The Logical Agents project builds an agent architecture based on automated reasoning in TAL. Each agent is equipped with a knowledge base, a database of logical formulas encoding background knowledge as well as memory. Automated theorem proving is used for reasoning with the content of the knowledge base, answering questions, and planning actions. Issues investigated in this project include the use of incompletely specified action timing, the generation of plans with infinite loops, and the integration of planning, execution, and plan revision.
» Read more about Logical Agents!
[an error occurred while processing this directive]Troubleshooting of Automotive Systems
 |
Heavy trucks – an application domain for troubleshooting. |
[Knowledge Processing Lab, Scania AB]
In the Troubleshooting of Automotive Systems project, we develop methods for efficient automatic troubleshooting of complex systems such as heavy trucks. Troubleshooting software should guide mechanics in a workshop in the process of finding and repairing vehicle faults, with the aim being to minimize the expected cost in terms of time and money. This problem can be modeled as a probabilistic planning problem where the vehicle to be repaired is a partially observable system. This project is run in close collaboration with the truck manufacturer Scania CV AB.
» Read more about Troubleshooting of Automotive Systems!
[an error occurred while processing this directive]Previous projects in the APD Group
DARE
Many forms of deliberation used by autonomous agents, including prediction and planning, make use of formal models of the environment in which the agent operates. In many cases, a tradeoff must be made between accuracy and performance, where more detailed models may provide highly accurate results but are not always feasible given limited computational resources. In most cases, this tradeoff is fixed by humans when a system is designed. The DARE project – Dynamic Abstraction-driven Replanning and Execution – investigates methods where agents take over part of this responsibility in the context of interleaved task planning and execution for fully or partially observable stochastic domains, dynamically constructing planning models at varying levels of abstraction as required by the problem at hand.
PARADOCS
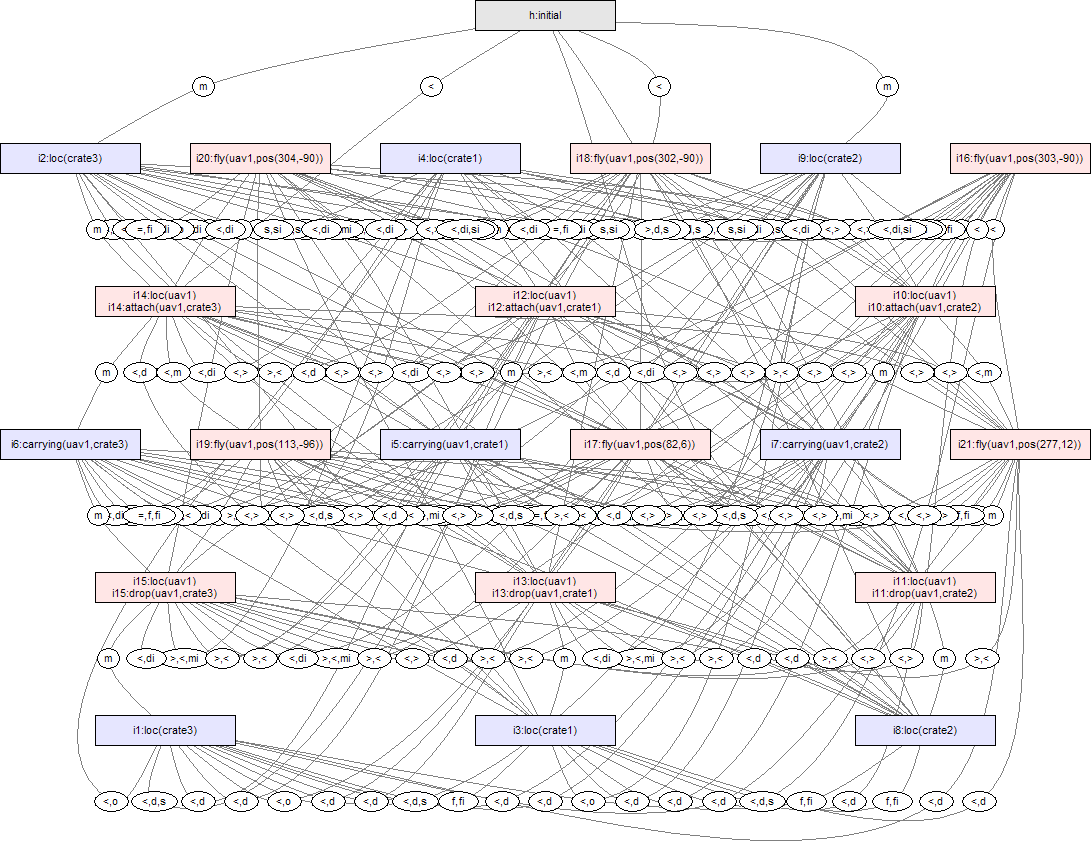 |
A plan generated by PARADOCS and its associated temporal constraint network. |
PARADOCS is a Prolog implementation of a reasoning system for a subset of TAL, that views Planning And Reasoning As DeductiOn with ConstraintS. It supports prediction from a fully instantiated set of actions, planning from the empty set of actions, and anything in between.
PARADOCS has been superseded by the Logical Agents project, which uses many of the insights gained through the development of PARADOCS.
Page responsible: Patrick Doherty
Last updated: 2014-11-06
