Research
My research interest is on the modeling of the environment for a system of robots using multiple sensors, in a goal of localization and of building maps that can be used by the robot to accomplish a mission. In particular, this modelisation can be used in a SLAM process (Simultaneous Localization And Mapping). So far, I have been working on modeling the environment by a geometric graph, this involves working on the extraction of features, the matching and the assembly of the model.
Four main challenges of modeling for a fast robot
A fast robot is...- ...a robot with a high speed, meaning the localisation process must be fast
- ...a robot which goes far, meaning it has to deal with a lot of data
- ...a robot which need to see far
- ...a robot that see far
Environnement modeling
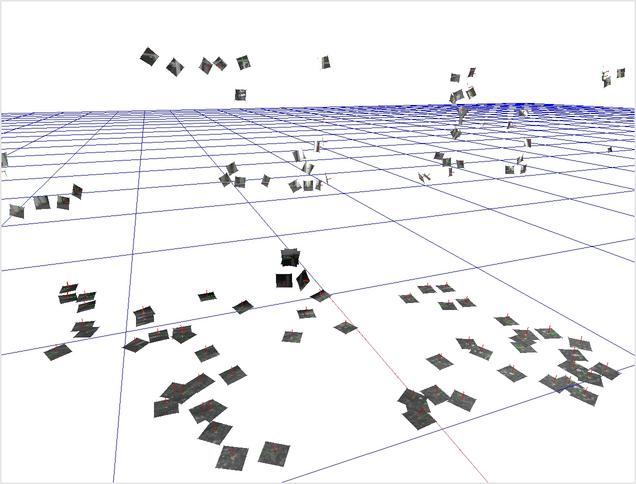
Model construction
Interest points
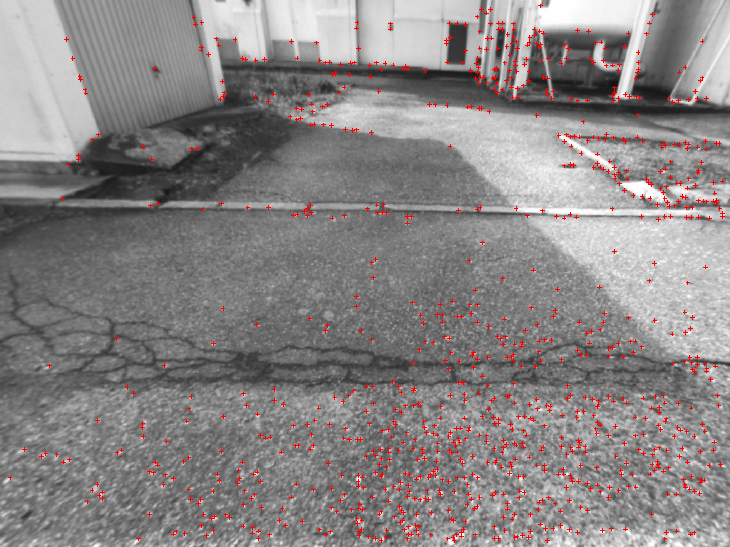
Facets are extension of interest points, including the planarity in the surrounding of each interest point.
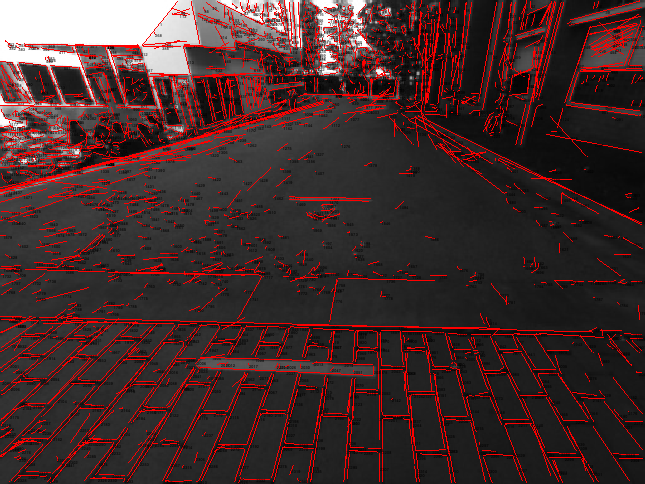
Segments