Scientific approach
Our research
The Softbank robot platform Pepper is used at Linköping University for two lines of research.
The division for Artificial Intelligence and Integrated Computer Systems (AIICS) is interested in the integration aspect of the complex software required
for autonomous humanoid robots. We are further interested in artificial intelligence
research building upon a sophisticated robotic software stack capable of
operating in unstructured human environments under the presence of humans
in a safe way.
The division of Human Computer Systems (HCS) is interested in the interaction aspect between humans and robots, and
especially how the robots behaviour is perceived by the humans. We are further
interested in learning how to design robots, in terms of appearance, body language
and dialogues, in order to maximise the usefulness and appreciation of
human robot interactions in the future.
One of the central concerns in human robot interaction (HRI) research is how
to make interaction with robots socially acceptable and comfortable to humans.
When the participants in a experiment situation think that they are talking
to a computer, though they in fact are not, and the conversation is instead
mediated by a human operator (the so-called wizard), it is called a Wizard of
Oz-design (WoZ). There are several reasons for wanting to conduct WoZ-
experiments. One is that computers are rigid and that people are flexible. In an
experiment when the participant interact with a computer, the situation might
change quickly in an unexpected way. If the experiment relies on a static system
that cannot change then the situation will not seem natural to the participant,
and therefore it is better with a wizard that can adjust.
WoZ is a common employed technique in HRI, where the wizard are control-
ling the robot on a number of things, such as the robots movements, navigation,
speech and gestures. Researchers mainly uses WoZ in HRI because robots
are not sufficiently advanced to interact autonomously with people in socially
appropriate ways, and this method make it possible for the participant to envision what future interaction could be like. Riek say that one methodological
concern regarding WoZ is that one can argue that it is not really human-robot
interaction so much as human-human interaction that is mediated through a
robot.
With all the stated issues regarding WoZ we are suggesting implementation
with more autonomous features, such as:
Face detection and recognition.
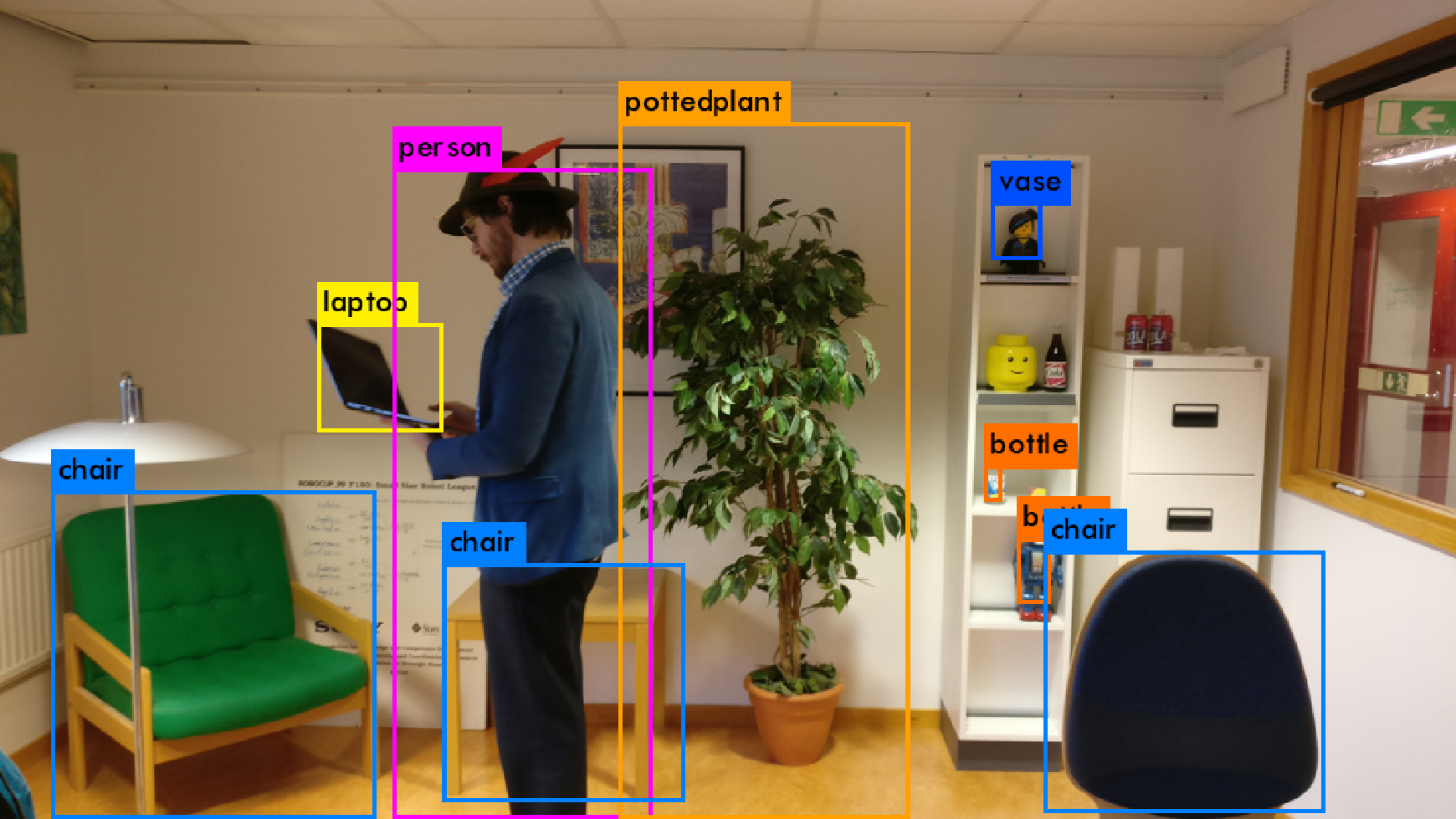
Object detection and recognition.
Gesture detection and recognition.
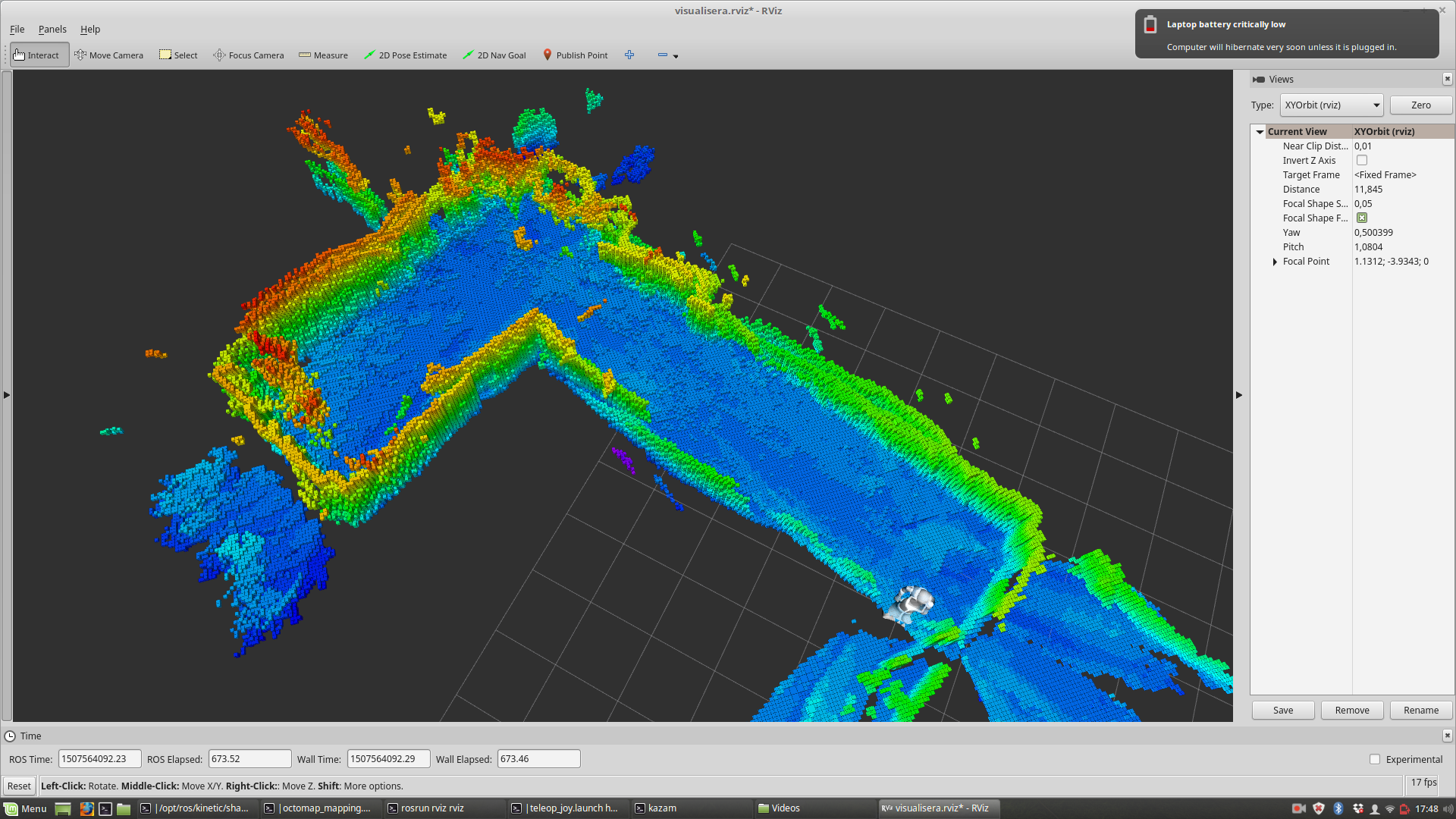
Navigation, localization and mapping.
Speech recognition and generation.
Translation.
Manipulation.
These features would make it possible for a more natural robot interaction instead
of a natural wizard interaction. This will have an impact on the research
in natural environments, like in a home, a classroom or a retirement facility
Approach
To achieve a more natural robot interaction, that is build on complex software for autonomous machines and artificial intelligence, we will use a lot of standardized components from the ROS community and elsewhere. We use for example Google cloud services for speech-to-text and text translation. To do more advanced Natural language processing we use the open source project spaCy. For face recognition we use OpenFace and for arm control we use MoveIt. For object detection, we are also trying out the system Yolo. We will also integarate state-of-the-art research results into software components and release these as open source for the wider robotics community. The code used for the competition will be released as open source after the competition.